Behavior trees in EyeAuras are tightly integrated with the built-in scripting system. Each Execute Script node is essentially a small program that can contain any set of commands. You can send input, draw on screen, show notifications, and generally use the full power of the EyeAuras API.
¶ Hello, World
Let’s add an Execute Script node to a tree:
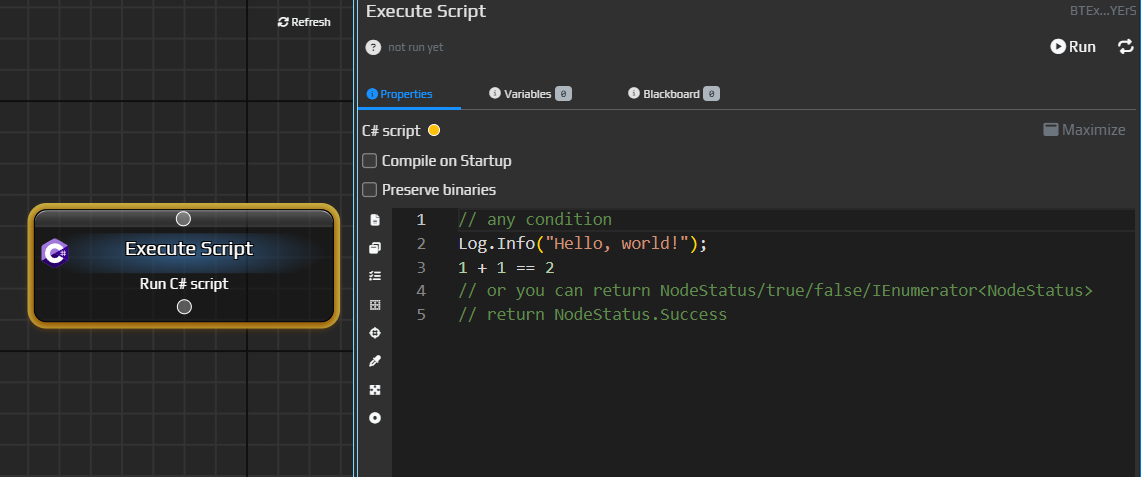
By default, this node prints "Hello, World" to the log and returns Success, because the condition is true:
1 + 1 = 2
is equivalent to:
return 1 + 1 == 2;
which is equivalent to:
return true;
or:
return NodeStatus.Success;
¶ NodeStatus
Every node in a behavior tree can return one of three statuses:
Success— the task was completed successfully (e.g., an object was found on screen).Failure— the task was not completed (e.g., a Selector couldn’t find a successful child node).Running— the task is still in progress (e.g.,WaitreturnsRunninguntil the wait time is over).
If a node returns Running, the tree will call it again on the next tick. There are exceptions (e.g., the Interrupter node can interrupt nodes in the Running state).
¶ IEnumerator and yield return
C# provides an interface called IEnumerator, which represents a sequence of values. What we’re interested in is the yield return keyword.
With yield return, you can implement nodes that maintain internal state between ticks:
Log.Info("Hello, world!");
return Run();
private IEnumerator<NodeStatus> Run()
{
var tickIndex = 0;
while (!cancellationToken.IsCancellationRequested)
{
tickIndex++;
Log.Info($"Tick #{tickIndex}");
if (tickIndex % 3 == 0)
{
yield return NodeStatus.Running;
}
else if (tickIndex % 5 == 0)
{
yield return NodeStatus.Success;
}
else
{
yield return NodeStatus.Failure;
}
}
}
If you call this script multiple times, you’ll see output like:
Tick #1 → Failure
Tick #2 → Failure
Tick #3 → Running
Tick #4 → Failure
Tick #5 → Success
Previously, this kind of stateful logic required using Variables or the Blackboard. Now the script lives between ticks.
¶ Real-world example
Let’s say you want to walk up to an NPC (MapDevice) and start a conversation by clicking it. This interaction isn’t instantaneous — it involves movement and waiting for the dialog UI.
Here’s the logic:
- Find the NPC (MapDevice) in the nearby entity list
- Check if the player is far from the NPC
- If far — start moving toward it
- Once close — click and wait for the dialog to open
private IEnumerator<NodeStatus> Run()
{
var mapDevice = GameController.Entities
.Where(x => x.Type is EntityType.IngameIcon && x.IsTargetable && x.TryGetComponent<MinimapIcon>(out var minimapIcon) && minimapIcon.Name == "MapDevice")
.FirstOrDefault();
if (mapDevice == null)
{
Log.Warn("Map Device not found");
yield return NodeStatus.Failure;
yield break;
}
const float minDistance = 20;
if (mapDevice.DistancePlayer > minDistance)
{
PF.AddDestination(mapDevice.GridPos, PfDestinationType.Interact, minDistance);
while (mapDevice.DistancePlayer > minDistance)
{
yield return NodeStatus.Running;
}
}
SendInput.MouseClick(CameraManager.WorldToScreen(mapDevice.BoundsCenterPos).ToPoint());
while (!AtlasManager.IsActive)
{
yield return NodeStatus.Running;
}
yield return NodeStatus.Success;
}
This is how coroutines inside behavior trees are born — just like Unity Coroutines.
The result: more compact, maintainable, and reactive behavior trees that can retain internal state between ticks.